




基于游客情感的导览策略
近年来,机器人技术快速发展,越来越多种类的机器人在生活中出现、应用。其中服务型机器人主要被用来为人们日常生活提供便利,而导览机器人则是服务型机器人的一种,能够代替人工导引和指南。
目前,大多数的机器导览都是基于预设的路线,可能无法满足当前使用者的心理预期,为了更好地体现机器人的智能性,尽可能的让机器人与人有情感交流,机器人导览策略应运而生,它基于机器情感,估计用户意图,从而找到用户最为期待的目标点。
.gif)
在今年8月来自 Electronics 的研究成果中,基于机器情感的机器人导航策略被提出,并在 Pepper 机器人身上得到了验证。
可识别人类情感的 Pepper
该策略通过游客的情感状态建立机器情感,机器情感赋予机器人与游客共情的能力,从而找到游客最期待的目标点。寻找目标点的过程中还包括新型引导地图,包含不同地点之间的距离和相关性。这样的地图能帮助导览机器人算出哪些目标点与当前位置相关,哪些不相关。与机器情感结合后,它就能判断用户是否对当前游览内容感兴趣,并结合不同游览点之间的距离信息做出最令人满意的决定。
在实验过程中,该团队选择了 Pepper 机器人及 Choregraphe 编程工具。
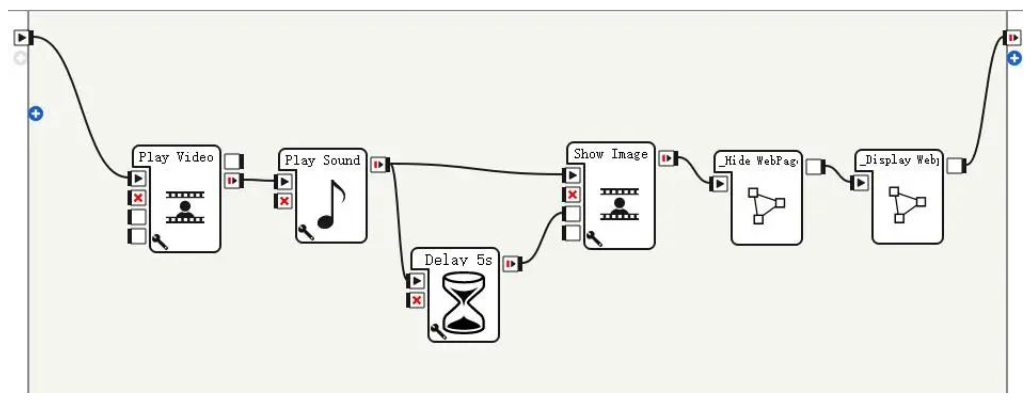
Choregraphe—从图形化编程到Python的进阶利器
基于 Choregraphe 编程技术,Pepper机器人作为测试对象,测试了机器人导览策略。
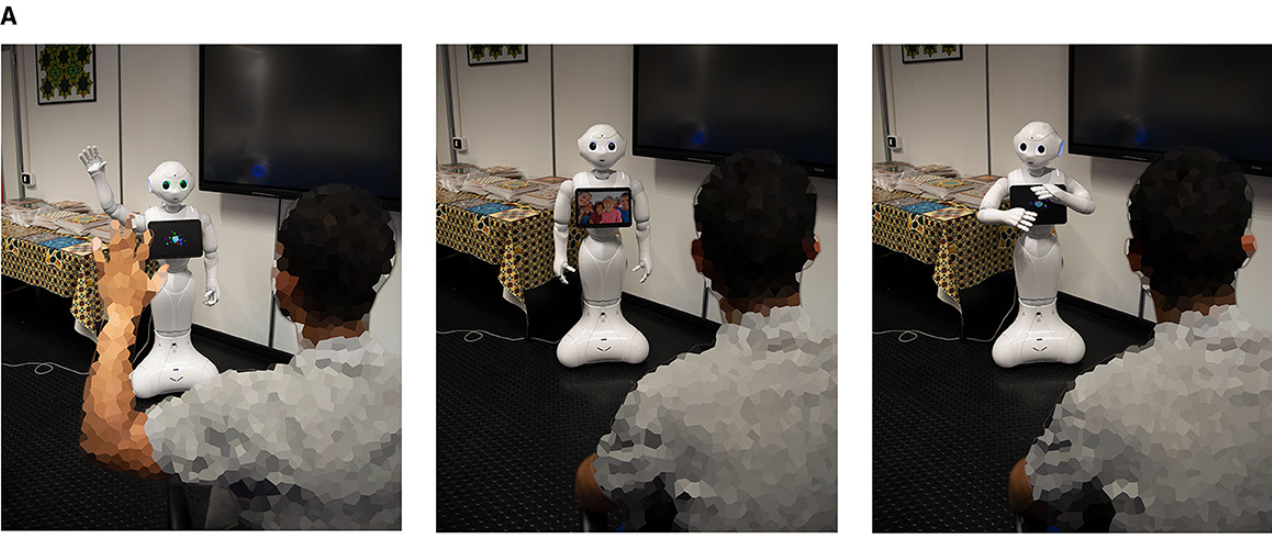
具体来说,Pepper 被放置于实验室场景中,通过面部表情识别来感知游客的当前情绪,基于此,Pepper 计算出其他的所有目标点对游客的吸引力,以找出最具吸引力的目标点。

Pepper 导览过程
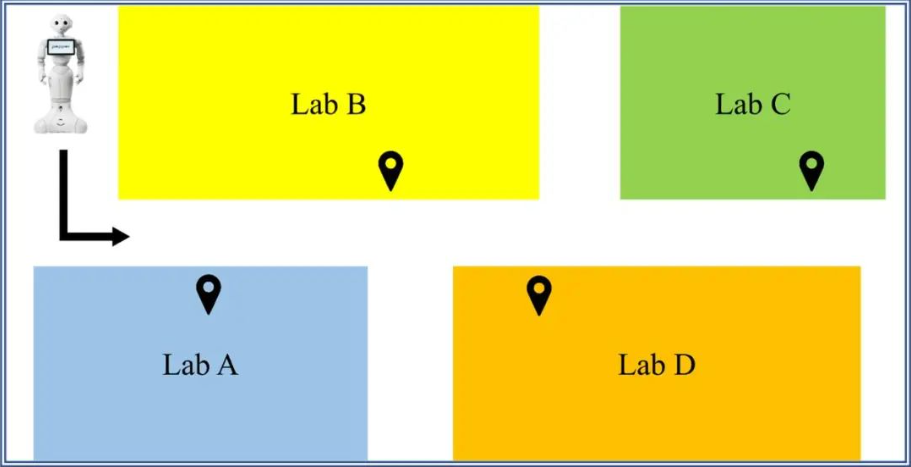
实验场地图
在实验中,ABCD四个点具有既定的预设参数,以辅助实验进行。
此外,导览功能的实现需要 Pepper 机器人自我定位。在实验中使用了Pepper 的自我定位的功能,绘制了可访问目标点之间的坐标关系。一旦确认下一个目标点并定位成功,Pepper 就能沿着指定方向的路线到达目的地。
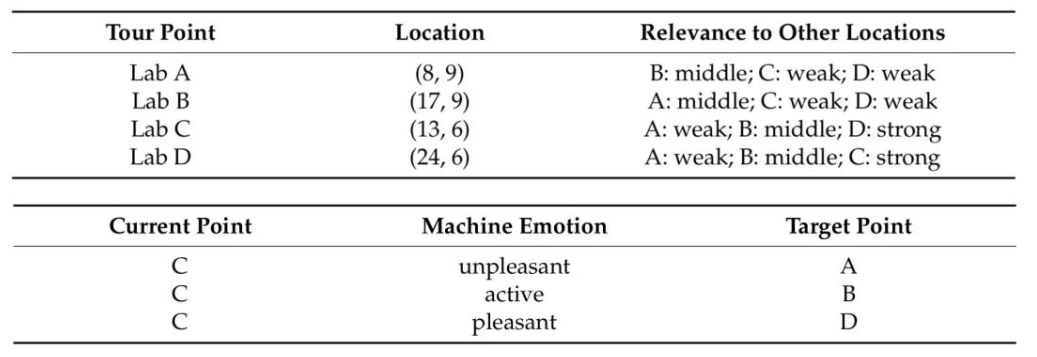
每个点的预设参数
未来已来
基于机器情感的多目标导览策略的提出,是对服务型机器人的进一步完善,能增强人与机器的互动,让机器人更具有“人性”。
具体而言,身怀“机器情感”的导览机器人能识别情绪、判断偏好,进而依据用户的情感状态,预测用户心中的目的地。据此,机器情感具有了更合适的表达空间,机器与人类产生了独特的“共情”力。
现有的导览技术结合未来的情感识别功能,是当代机器人智能化特性的进一步呈现。当身怀情感的导览型机器人投身服务领域,它们将为人类生活带来崭新的图景,而这也正是我们秉承的理念,即以科技创新助力人类幸福,为全人类带来福祉。
.jpg)

.png_774_400.png)







.jpg)
