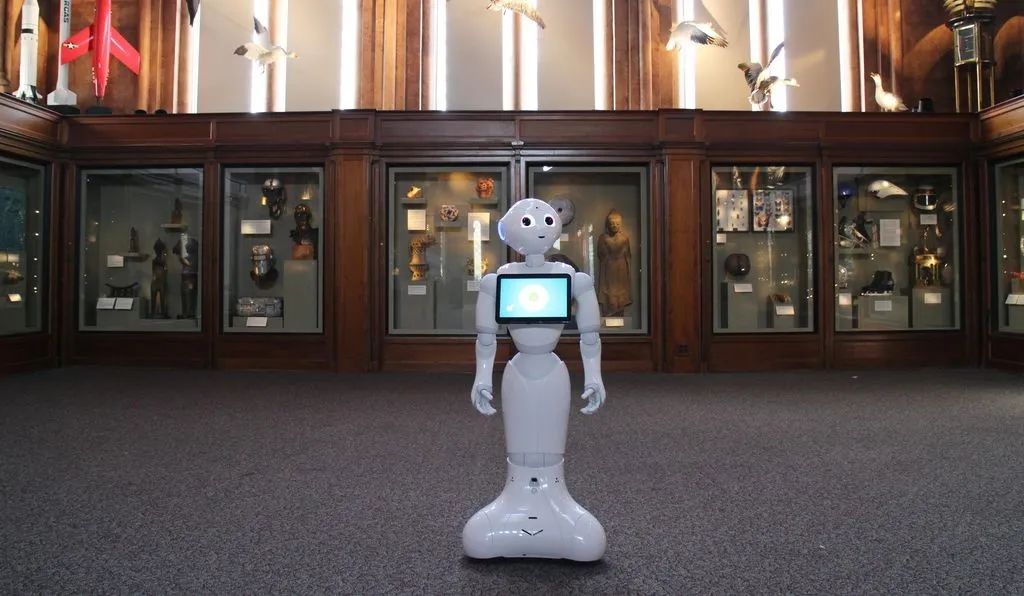
NAO机器人在自主机器人算法研究方面具有很大的应用潜力。通过对NAO机器人进行编程和算法开发,研究人员可以探索自主导航、环境感知、任务规划等方面的技术问题,推动自主机器人领域的发展。
在自主导航和环境感知方面,NAO机器人可以通过编程实现自主导航功能,包括路径规划、避障等,帮助研究人员更好地了解自主机器人在不同环境下的导航能力,为自主机器人技术的发展提供有力的支持。同时,NAO机器人还可以通过编程实现环境感知功能,包括视觉、声音、触觉等,帮助研究人员更好地了解自主机器人在不同环境下的感知能力,为自主机器人技术的发展提供有力的支持。通过对NAO机器人进行导航和感知算法的优化,可以提高自主机器人的导航和感知能力,使其更加适应不同环境下的应用场景。
在任务规划和执行方面,NAO机器人可以通过编程实现任务规划功能,包括任务分解、任务调度等,帮助研究人员更好地了解自主机器人在不同任务下的规划能力,为自主机器人技术的发展提供有力的支持。同时,NAO机器人还可以通过编程实现任务执行功能,包括动作控制、物体操作等,帮助研究人员更好地了解自主机器人在不同任务下的执行能力,为自主机器人技术的发展提供有力的支持。通过对NAO机器人进行任务规划和执行算法的优化,可以提高自主机器人的规划和执行能力,使其更加适应不同任务下的应用场景。
此外,NAO机器人还可以作为一个教育机器人平台,帮助培养未来的机器人技术人才,同时探索自主机器人在服务机器人、教育机器人等领域的应用,为自主机器人技术的发展带来新的思路和创新。因此,NAO机器人成为推动自主机器人算法研究的领先平台。
价值主张
自主导航
视声触全方位环境感知
实现多环境自主导航

任务规划与执行
任务分解调度 动作控制操作
不断测试优化算法
技术创新与发展
探索全新应用与问题
推动技术创新发展
相关应用案例推荐

快人一步了解软银及机器人产品信息
点击接收最新讯息
想了解更多?
联系我们以获得更多产品资讯











.jpg)
